This is an old revision of the document!
Table of Contents
Swift Navigation / Carnegie Robotics Duro
Initially released by Swift Navigation in early 2020, then was bought by Carnegie Robotics in fall 2024,
Duro™ is a ruggedized, high-performance and low-cost GNSS receiver with Real Time Kinematics (RTK) technology for a centimeter-level positioning accuracy. GNSS multi-band and multi-constellation support enable Duro to offer fast RTK convergence times and high position availability.
Duro uses the Piski Multi multi-band, multi-constellation GNSS receiver in a ruggedized enclosure. This page will contain information about both the Duro and Piksi Multi - as far as I can tell, there is little inherently unique about the Duro compared to the Piksi Multi mounted on the evaluation board that Swift Navigation also sold it on.
A variant of the Duro, called “Duro Inertial” also exists. As far as I have been able to determine, the hardware is identical, but it has additional software that enables the IMU to be used for inertial navigation in the event of GNSS loss.
Specs
Because the Duro uses the Piksi Multi internally, these specs are those of the Piksi Multi. The Duro has capable DC-DC power supplies on-board and runs off 10-35v DC, consuming 5-6w. Additionally, it can supply 0.25A of 5v and 1A of 12v on its serial and aux connectors, for powering external devices.
All of this is laid out in the HW Spec PDF, but at a high level:

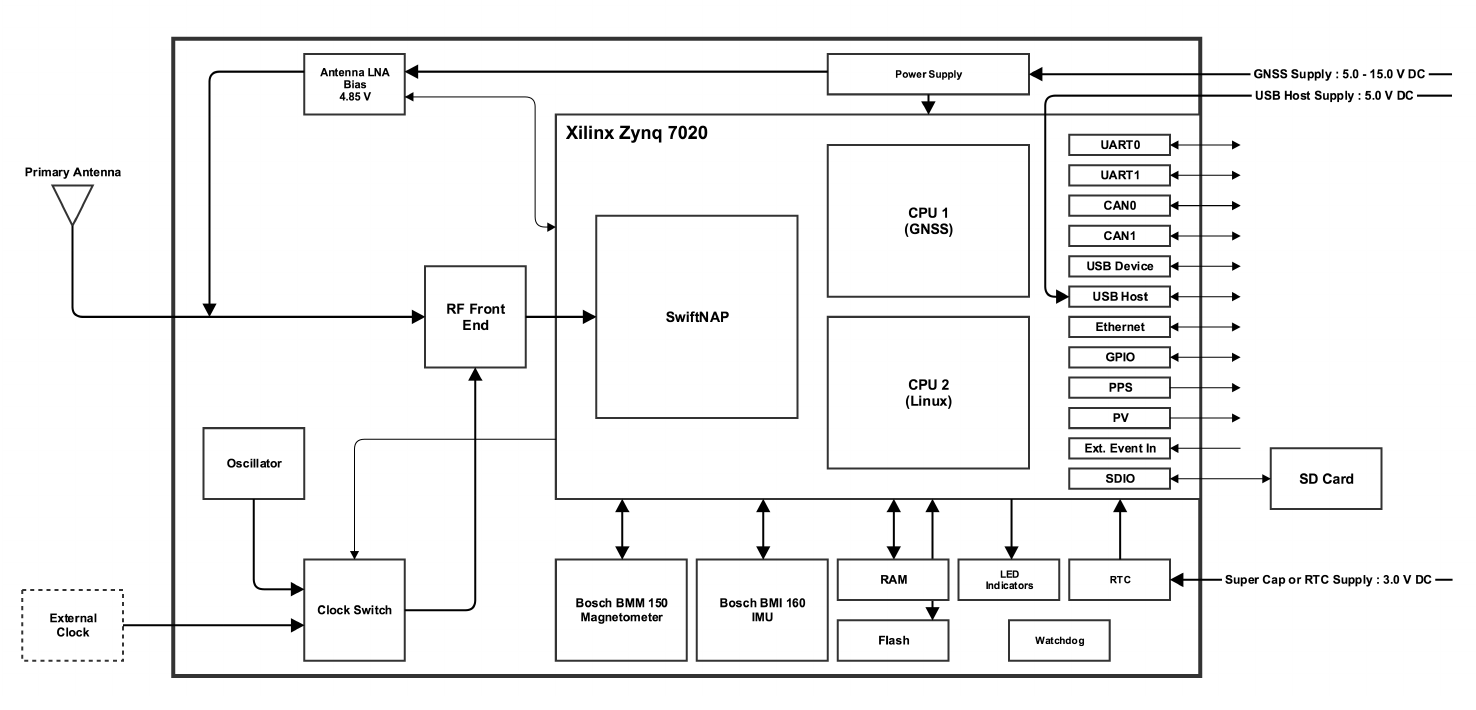
- Based on the Zync 7020 running custom cores and linux
- Dual band RTK, up to 10Hz
- GPS L1/L2
- GLONASS G1/G2
- BeiDou B1/B2
- Galileo E1/E5b
- Raw measurements at 20Hz
- On-board IMU (Bosch BMI160) and magnetometer (Bosch BMM150) accessible through binary data stream
- I/O
- UART, Ethernet, CAN, USB
- Communication Protocols
- SBP, NMEA, RTCM
- Software-switchable antenna bias power, 4.85v at up to 100mA
Satellite tracking and acquisition, as well as the calculation of PVT solutions, are handled entirely by the Zynq 7020. A program in the Zynq, which Swift Navigation calls “SwiftNAP”, receives the digitized RF and passes it directly to other software on the device.
Piksi Multi employs a unique design, which does not utilize an ASIC. Instead, the tracking and correlation duties are serviced by the programmable logic of the Zynq 7020. This allows Piksi Multi to be extremely flexible with regards to how tracking and correlation resources are allocated; it also makes comparisons of tracking channel count largely irrelevant.
Piksi Multi is capable of simultaneous tracking of L1 and L2 signals from up to 22 satellites. Piksi Multi HW Specification v2.2 [000-534-02-02], p.2
Connectivity
Like just about every other commercial GNSS receiver, especially rugged ones, the Duro uses unique connectors for power, serial, ethernet, etc. Unfortunately un-casing the unit does not readily provide access to these signals internally, so using the connectors as intended is the best course of action for working with the Duro.
At the time of this writing, Carnegie Robotics still sells the interface cables for the Duro, and they are relatively affordable.
https://shop.carnegierobotics.com/collections/duro-accessories
The connectors used are standard M12, which are slightly more available than LEMO or Fischer, and the user manual documents them well, if you choose to make your own cables.
Use
Static
WIP
Dynamic
WIP
Documents and Files
All of these are currently readily available on the public web, these copies are provided as backups.
Notes and Curiosities
Provided in no particular order, the below are bits and pieces I have discovered when researching or using the Duro/Piksi Multi, that I may want to refer back to in the future, or that others may find interesting.
- The Duro has a microSD card and micro USB port accessible externally, via a door on the rear. This is mentioned very little. The Piksi Multi evaluation board has both as well as a USB host port, and they are connected directly to the Piksi Multi. The micro USB port is connected to USB0 on the Zynq, and acts as a “common device class” serial port and can be configured for I/O the same as the serial ports. USB1, the host port, is not available on the Duro as far as I can see, and is intended for flash drives for logging or firmware updates. An August 2020 capture of the Duro specification page states “Duro contains 32 GB on-board storage for data logging which is not yet supported but planned to be released with a future firmware release.” but it's not clear if this ever happened. The latest revision of the Duro User Manual (4.4) which has Carnegie Robotics branding, clearly states “Warranty is voided if Duro back access panel is opened.”
- A number of “typical” GNSS features were on the road map, but never implemented - hot starts, warm starts, and RTC backup with an external battery or supercap. Essentially, every boot is a cold-start, though I suspect it saves almanacs and ephmerides and will use them if they are valid, after a restart.


- The Duro carrier board has two 10 pin headers arranged in what appears to be the appropriate footprint for an XBee module, and there is space inside the enclosure for one. The microSD slot is also shared with a SIM slot. In early documentation there are photos of the Duro with an SMA connector next to the TNC connector - presumably there were plans to give the Duro its own connectivity, but they were abandoned. The product summary document from March 2018 describes the cellular modem as a beta feature.
- There are at least two variants of the Duro carrier board, 0036402Rev5 and 0036401Rev03. The 02 board is what is in my unit, and seems to be the newer board. The 01 board has 2017 datecodes, and the XBee headers are mounted on a custom mini-PCIe card. The 02 has the footprint for this mini-PCIe card, but it is not populated. The 01 board also has a small LiPo pack mounted, the 02 again does not have it installed, but has the footprint.
- 0036401Rev03


- 0036402Rev05



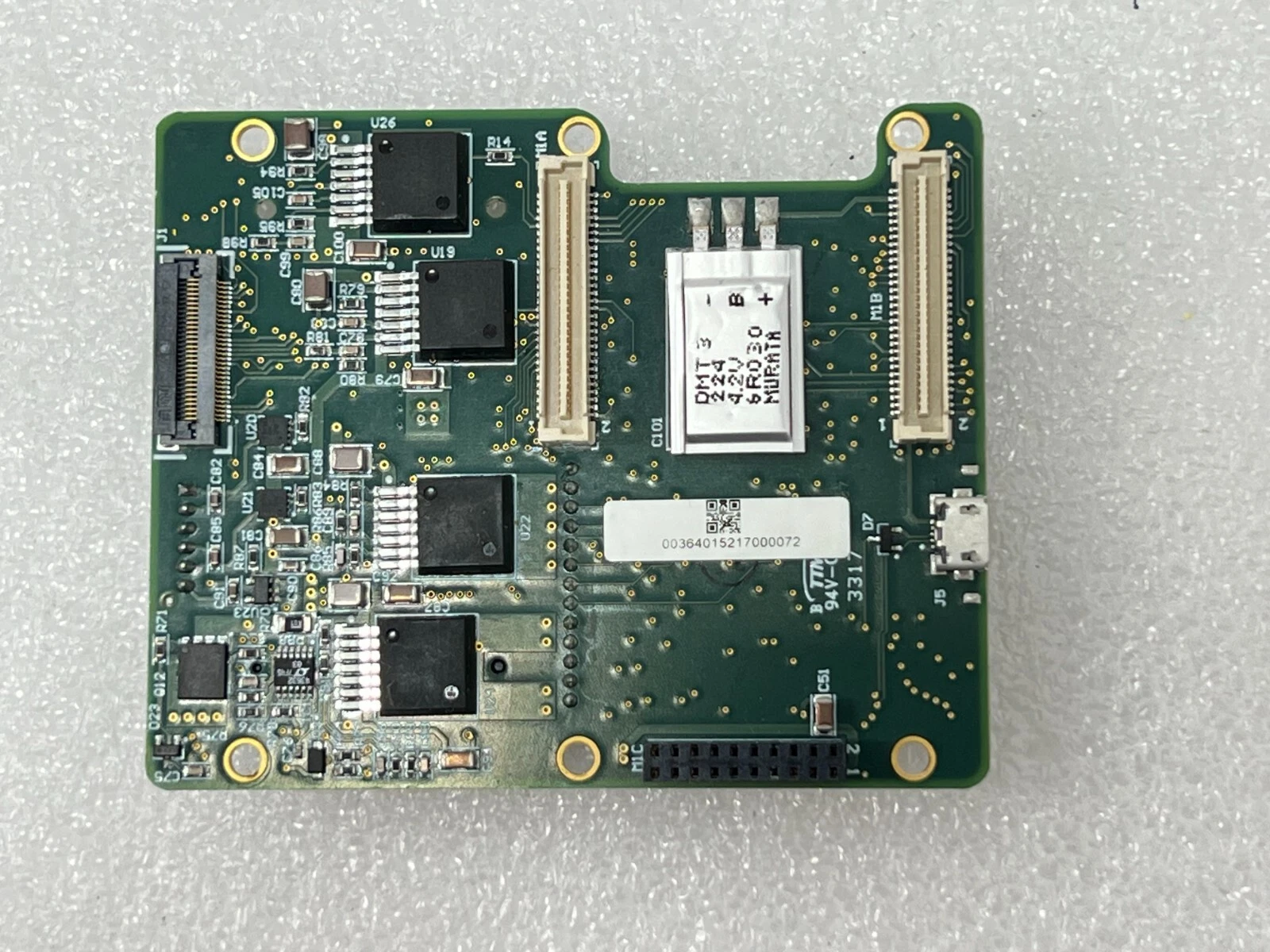
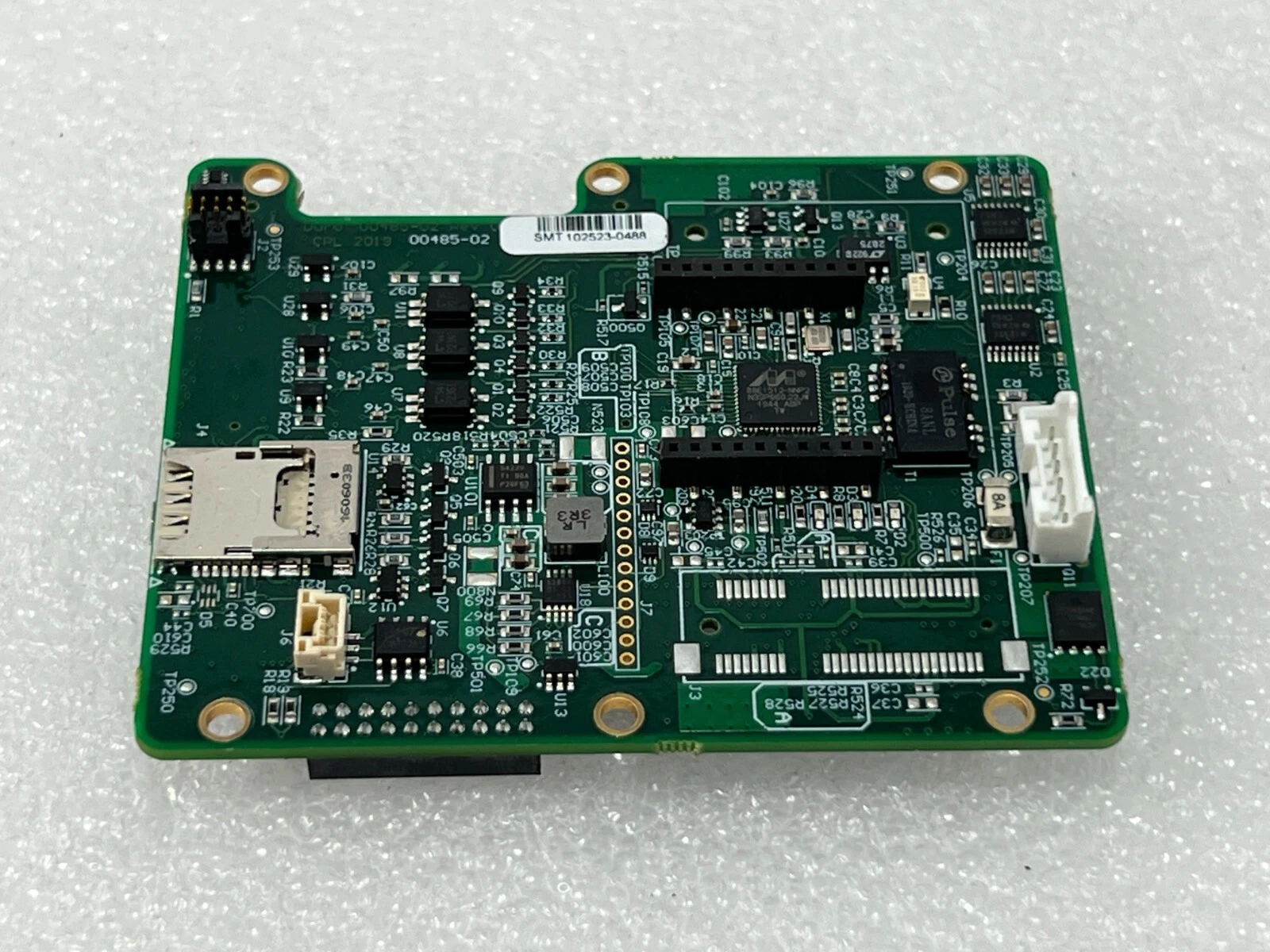
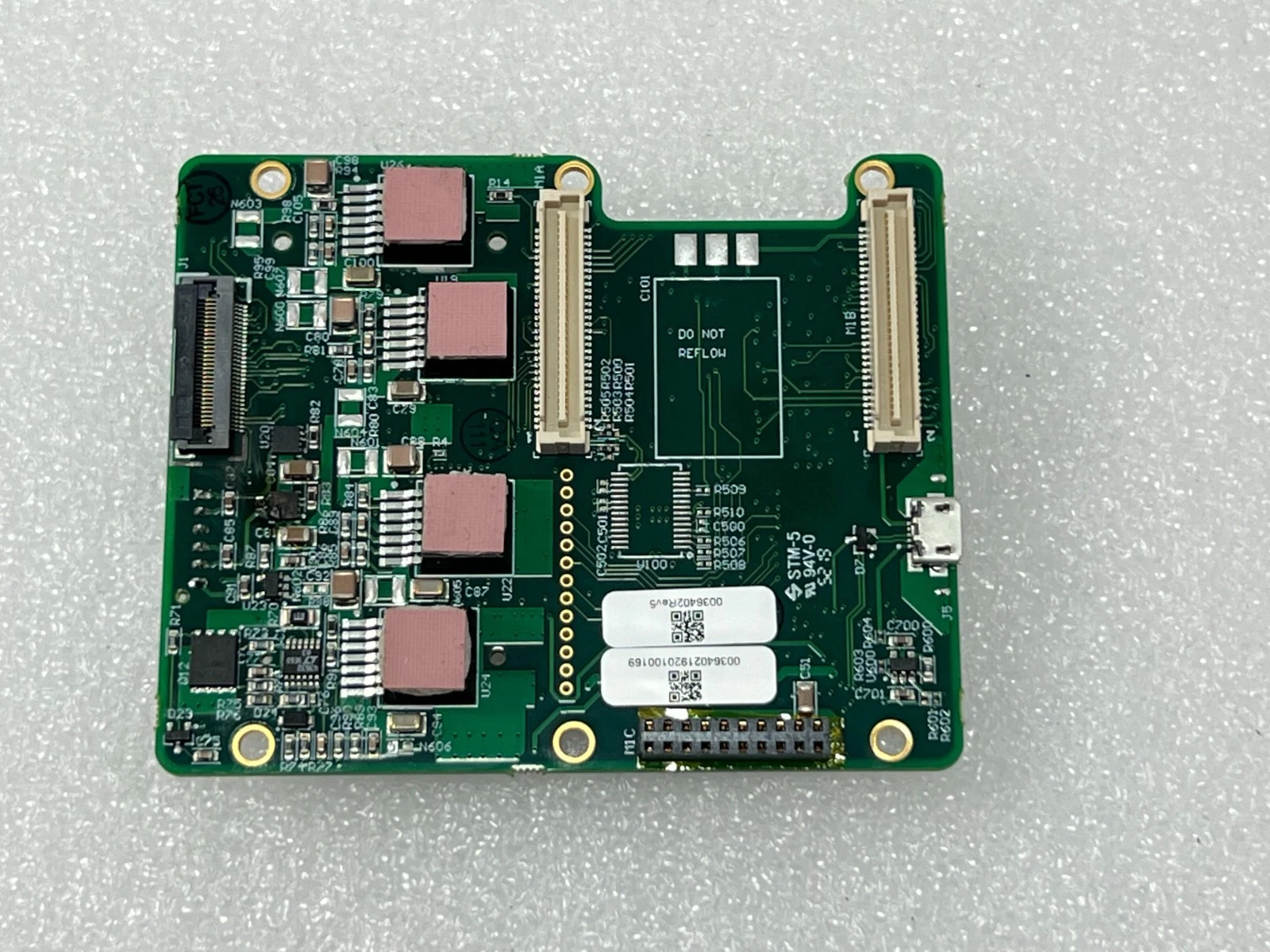
Photos
My Duro is a late model, with Carnegie Robotics branding. It is not clear to me when it was manufactured, but the Marvell PHY on the carrier board has a late 2021 date code. The Piksi Multi seems to be an 00108-09 revision, but I haven't confirmed its date of manufacture yet.
Note that the Verbatim microSD card was not included in the unit, I placed it in the slot to demonstrate how it fits.
















